I’m off to the RMA study day on “Embodied Research Methods in Music& Sound” in Liverpool on Tues 18th May.…

Making music with text[ure]
I’m off to the RMA study day on “Embodied Research Methods in Music& Sound” in Liverpool on Tues 18th May.…

I stopped using ‘social media’ for a while now for the usual reasons — it’s an inhumane way of interacting…
Lately I’ve been exploring 8-shaft weaving trying some things inspired by Laura Devendorf, focussing on ‘crackle weave’ using the AdaCAD…

After my previous warping catastrophe, I started again with some fresh yarn (I’m not sure if I’ll be able to…

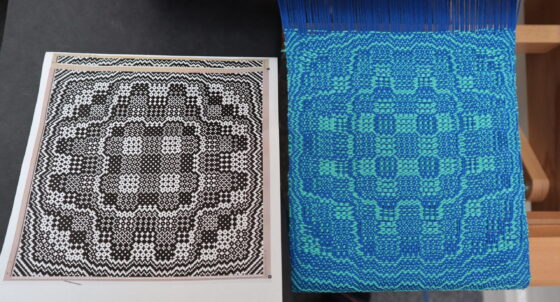
I’ve made the below crackle weave design in AdaCAD, but have run out of ‘warp’ threads on my loom, and…

A story about how some nice sounding freezers in Sheffield hit international news.

I’ve been having fun trying to understand crackle weave more, after weaving one of Ralph Griswold’s algorithmically generated patterns. It’s…

I’ve used some samples of different speech synth voices saying “algorave generation, we love repetition” for a while. It’s a…

Continuing the weaving theme I was happy to see that Laura Devendorf has not only included the ‘bitfield’ feature I…

After a bit of time off from weaving after the PENELOPE project, it was great to visit Kristina Andersen, Pei-Ying…